
Design, simulation and first test of an automatic suturing device coupled to a robot
Diseño, simulación y primera prueba de un dispositivo de sutura automática acoplado a un robot
Barra lateral del artículo
 FLIP
FLIP



Términos de la licencia (VER)

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
Declaración del copyright
Los autores ceden en exclusiva a la Universidad EIA, con facultad de cesión a terceros, todos los derechos de explotación que deriven de los trabajos que sean aceptados para su publicación en la Revista EIA, así como en cualquier producto derivados de la misma y, en particular, los de reproducción, distribución, comunicación pública (incluida la puesta a disposición interactiva) y transformación (incluidas la adaptación, la modificación y, en su caso, la traducción), para todas las modalidades de explotación (a título enunciativo y no limitativo: en formato papel, electrónico, on-line, soporte informático o audiovisual, así como en cualquier otro formato, incluso con finalidad promocional o publicitaria y/o para la realización de productos derivados), para un ámbito territorial mundial y para toda la duración legal de los derechos prevista en el vigente texto difundido de la Ley de Propiedad Intelectual. Esta cesión la realizarán los autores sin derecho a ningún tipo de remuneración o indemnización.
La autorización conferida a la Revista EIA estará vigente a partir de la fecha en que se incluye en el volumen y número respectivo en el Sistema Open Journal Systems de la Revista EIA, así como en las diferentes bases e índices de datos en que se encuentra indexada la publicación.
Todos los contenidos de la Revista EIA, están publicados bajo la Licencia Creative Commons Atribución-NoComercial-NoDerivativa 4.0 Internacional
Licencia
![]()
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-NoDerivativa 4.0 Internacional
Contenido principal del artículo
Resumen
Objective: Robotic assistants are becoming a very helpful tool for surgeons. As for
the suturing procedure, several commercial devices assist the physician in suturing.
However, such devices have not yet been coupled to a robot assistant in order to
perform sutures fully automatically. This could contribute to a procedure that is
often routinely performed but requires time and dexterity.
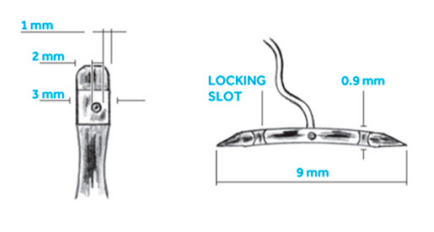
Materials and methods: This article presents the adaptation of a commercial
manual suture gripper, the Medtronic Endo Stitch, to a Universal Robots UR3 robot.
The gripper was modeled in SolidWorks, as well as a motorized coupling device,
which were simulated in CoppeliaSim. Once its proper functioning was verified, the
device was fabricated in a 3D printer and coupled to a UR3 robot, then its operation
was tested in the tracking of a suture trajectory with displacement.
Results: The trajectories planned in Matlab are sent to the UR3 robot via
ROS. It was possible to verify the good performance of the suture movement with
displacement, carried out by the printed device and by the Endo Stitich gripper.
The opening and closing of the gripper was also obtained under the action of the
motors included in the device.
Conclusions: The motorized device together with the Endo Stitch gripper,
coupled to the UR3 robot, is capable of following the trajectories required for
automatic suturing. Future work will test suturing with thread on a test phantom in
order to measure its true potential for automatic suturing.
Descargas
Detalles del artículo
Citaciones




Referencias (VER)
Andersen, R. S. (2018). Kinematics of a UR5. Aalborg University, 1–12. http://rasmusan.blog.aau.dk/files/ur5_kinematics.pdf
Arcese, L., Fruchard, M., & Ferreira, A. (2013). Adaptive Controller and Observer for a Magnetic Microrobot. IEEE Transactions on Robotics, 29(4), 1060–1067. DOI: 10.1109/TRO.2013.2257581
Bauzano, E., Garcia-Morales, I., & Muñoz-Martinez, V. (2013). Asistencia de Robots Colaborativos para Procedimientos de Sutura Vía Cirugía Mínimamente Invasiva. XXXIV Jornadas de Automática, Barcelona, España. https://www.researchgate.net/publication/303881054
Beuss, F., Schmatz, F., Stepputat, M., Nokodian, F., Fluegge, W., & Frerich, B. (2021). Cobots in maxillofacial surgery - Challenges for workplace design and the human-machine-interface. Procedia CIRP, 100, 488–493. DOI:10.1007/s10845-022-01953-w
Brehmer, B., Moll, C., Makris, A., Kirschner-Hermanns, R., Knüchel, R., & Jakse, G. (2008). EndoSewTM: New device for laparoscopic running sutures. Journal of Endourology, 22(2), 307–311. DOI: 10.1089/end.2007.0055
Chen, Y., Wang, Q., Chi, C., Wang, C., Gao, Q., Zhang, H., Li, Z., Mu, Z., Xu, R., Sun, Z., & Qian, H. (2022). A collaborative robot for COVID-19 oropharyngeal swabbing. Robotics and Autonomous Systems, 148, 103917. DOI: 10.1016/j.robot.2021.103917
Cho, C. N., Cho, S. H., Cho, S. Y., Kim, K. G., & Park, S. J. (2016). A Novel Successive Suturing Device for Laparoscopic Surgery. Surgical Innovation, 23(4), 390–396. DOI: 10.1177/1553350616628682
D’Auria, D., & Persia, F. (2017). A collaborative robotic cyber physical system for surgery applications. 2017 IEEE International Conference on Information Reuse and Integration, San Diego, USA, 79–83. DOI: 10.1109/IRI.2017.84
Díez del Val, I., Loureiro, C., Asensio, J. I., Bettonica, C., Leturio, S., Eizaguirre, E., Miró, M., García, M. M., Martí, L., Aranda, H., Barrenetxea, J., Estremiana, F., Ortiz, J., & Farran, L. (2019). Minimally Invasive and Robotic Surgery in the Surgical Treatment of Esophagogastric Junction Cancer. Cirugía Española (English Edition), 97(8), 451–458. DOI: 10.1016/j.ciresp.2019.03.013
Galvao-Neto, M., Grecco, E., Souza, T. F., Quadros, L. G., Silva, L. B., & Campos, J. M. (2016). Endoscopic Sleeve Gastroplasty - Minimally Invasive Therapy for Primary Obesity Treatment. Arquivos Brasileiros de Cirurgia Digestiva, 29(suppl 1), 95–97. DOI: 10.1590/0102-6720201600S10023
García, M. L., Castro, L., Aguirrezabalaga, J., & Noguera, J. F. (2021). Robotic-like suturing with FlexDex Surgical System® for difficult laparoscopic suture. Cirugía Española, 99(3), 222–228. DOI: 10.1016/j.ciresp.2020.10.005
Gonzalez, C. A. (2018). Desarrollo de aplicaciones industriales con robots colaborativos utilizando el middleware de control de robots. Máster en Ingeniería Industrial, Universidad Politecnica de Valencia, España.
Guevara, P. (2019). Dispositivo mecatrónico para el manejo de un instrumento quirúrigico de sutura laparoscópica. Tesis pregrado Ingeniería de Sistemas y Automática, Universidad de Málaga, España. http://zaguan.unizar.es/TAZ/EUCS/2014/14180/TAZ-TFG-2014-408.pdf
Hideki, E., Simas, H., & Martins, D. (2015). New Kinematic Structures For One-side Stitching Devices. Proceedings of the 23rd ABCM International Congress of Mechanical Engineering, December. DOI:10.13140/RG.2.1.4777.8644
Huhn, J. C. (2016). Advances in Equipment and Instrumentation in Laparoscopic Surgery. Veterinary Clinics of North America - Small Animal Practice, 46(1), 13–29. DOI: 10.1016/j.cvsm.2015.08.005
Iacovacci, V., Lucarini, G., Innocenti, C., Comisso, N., Dario, P., Ricotti, L., & Menciassi, A. (2015). Polydimethylsiloxane films doped with NdFeB powder: magnetic characterization and potential applications in biomedical engineering and microrobotics. Biomedical Microdevices, 17, 112. DOI: 10.1007/s10544-015-0024-0
Kam, M., Saeidi, H., Hsieh, M. H., Kang, J. U., & Krieger, A. (2021). A Confidence-Based Supervised-Autonomous Control Strategy for Robotic Vaginal Cuff Closure. 2021 IEEE International Conference on Robotics and Automation (ICRA), Xián, China, 12261–12267. DOI: 10.1109/icra48506.2021.9561685
Kebria, P. M., Al-Wais, S., Abdi, H., & Nahavandi, S. (2017). Kinematic and dynamic modelling of UR5 manipulator. 2016 IEEE International Conference on Systems, Man, and Cybernetics, Budapest, Hungary, 4229–4234. DOI: 10.1109/SMC.2016.7844896
Leeds, S. G., Wooley, L., Sankaranarayanan, G., Daoud, Y., Fleshman, J., & Chauhan, S. (2017). Learning Curve Associated with an Automated Laparoscopic Suturing Device Compared with Laparoscopic Suturing. Surgical Innovation, 24(2), 109–114. DOI: 10.1177/1553350616687903
Lin, C., Li, X., Phan, P. T., Meng, A. H. T. H. L. K., Liu, J., Lai, W., Huang, Y., Le, H. M., Miyasaka, M., Ho, K. Y., Chiu, P. W. Y., & Phee, S. J. (2020). Sewing up the Wounds: A Robotic Suturing System for Flexible Endoscopy. IEEE Robotics & Automation Magazine, 27(3), 45-54.
Medtronic. (2022). Endo Stitch™ Suturing Device. https://medtronic.com. Acceseed november 2022.
Melzer, A., Schurr, M. O., Lirici, M. M., Klemm, B., Stöckel, D., & Buess, G. (1994). Future trends in endoscopic suturing. Endoscopic Surgery and Allied Technologies, 2(1), 78–82.
Muñoz, A. (2020). Estrategia de control del robot UR3 para entornos de cirugía robotizados, Maestría en Ingeniería Industrial, Universidad de Valladolid, España. http://uvadoc.uva.es/handle/10324/42399
Nguyen, N. T., Mayer, K. L., Bold, R. J., Larson, M., Foster, S., Ho, H. S., & Wolfe, B. M. (2000). Laparoscopic suturing evaluation among surgical residents. Journal of Surgical Research, 93(1), 133–136. DOI: 10.1006/jsre.2000.5969
Nuzzi, R., & Brusasco, L. (2018). State of the art of robotic surgery related to vision: Brain and eye applications of newly available devices. Eye and Brain, 10, 13–24. DOI: 10.2147/EB.S148644
Páez, D., Romero, J. P., & Guarnizo, J. G. (2021). UR3 modelo cinemático inverso. Documento interno de investigación. Universidad Santo Tomás, Colombia. DOI: 10.15332/dt.inv.2021.02849 https://doi.org/10.15332/dt.inv.2021.02849
Pedram, S. A., Ferguson, P., Ma, J., Dutson, E., & Rosen, J. (2017). Autonomous suturing via surgical robot: An algorithm for optimal selection of needle diameter, shape, and path. 2017 IEEE International Conference on Robotics and Automation, Singapur, 2391–2398, DOI: 10.1109/ICRA.2017.7989278
ROS (2022). Robot Operating system. https://www.ros.org/. Acceseed november 2022.
Universal Robots (2022). https://www.universal-robots.com/es/productos/robot-ur3/. Acceseed november 2022.
Vivas, A., & Sabater, J. M. (2021). UR5 Robot Manipulation using Matlab/Simulink and ROS. 2021 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 338–343. DOI: 10.1109/ICMA52036.2021.9512650